เครื่องสกัดอัตโนมัติเต็มรูปแบบสามารถถอดชิ้นส่วนหล่อแทนแขนมนุษย์ได้
รายการสินค้า
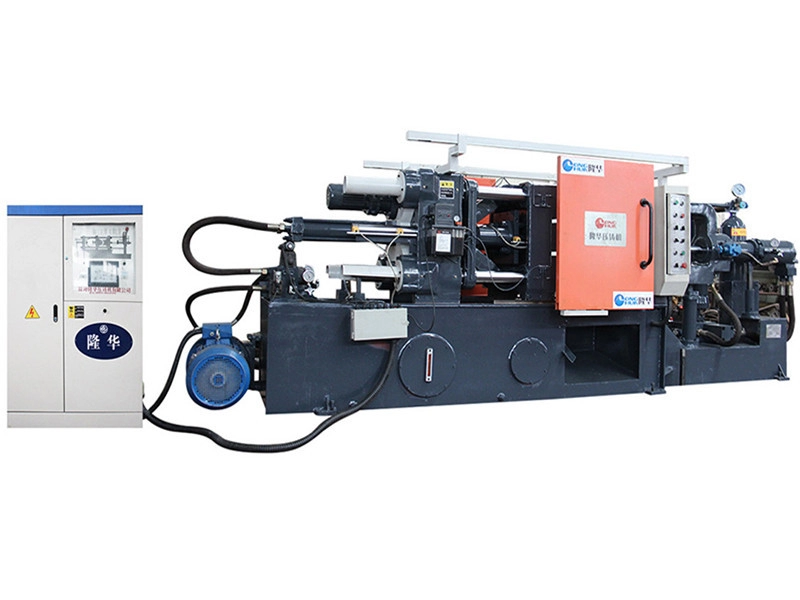
เครื่องสกัดแบบอัตโนมัติสำหรับเครื่องหล่อแบบตายตัว
รายละเอียดสินค้า

คุณสมบัติของสินค้า
1.แขนหลายลิงค์แนวนอน ติดตั้งบนพื้นขนาดกะทัดรัดออกแบบขนาดเล็ก
2. การใช้มอเตอร์เข็มไซโคลลอยด์ chuanshih ของไต้หวันและตัวลดความเร็ว การควบคุมความเร็วแบบหลายขั้นตอนของแขนมีเสถียรภาพมากกว่าการควบคุมแบบนิวแมติก ซึ่งสามารถเคลื่อนที่ด้วยความเร็วสูงโดยไม่มีผลกระทบ
3. พารามิเตอร์เวลาและการตั้งค่าตำแหน่งสามารถตั้งค่าผ่านหน้าจอสัมผัสพร้อมฟังก์ชั่นการทำงานและการวินิจฉัยข้อผิดพลาดด้วยตนเองซึ่งสามารถตรวจสอบตำแหน่งการกระทำแต่ละตำแหน่งของอุปกรณ์
4. ตัวเข้ารหัสค่าสัมบูรณ์ของ TOYO ของญี่ปุ่นใช้เพื่อปรับตำแหน่งแขนให้เป็นดิจิทัล
5. การวาดด้านข้างขับเคลื่อนด้วยมอเตอร์
6.สามารถทำงานคนเดียวหรือเชื่อมต่อกับเครื่องหล่อ เครื่องป้อนซุป และเครื่องพ่นสารเคมีให้เป็นอุปกรณ์อัตโนมัติเต็มรูปแบบ
พารามิเตอร์ผลิตภัณฑ์
ไฟฟ้า: AC220V 50Hz 2KVA
ส่วนต่อประสานแหล่งอากาศ: 1 / 2 "5.0-6.0กก./ซม
ระยะชักที่แขนหลัก: 650-950 มม
ระยะเคลื่อนตัว: 40-180 มม
ระยะเวลาดำเนินการ: 4-8S
การหมุนแขนหลัก: 90 องศา
ขนาด: 1200 มม. × 700 มม. × 1,000 มม
น้ำหนักเครื่อง : 350กก
| หมายเลขซีเรียล |
การดำเนินการ |
ปัจจัยเชิงสัมพันธ์C |
R ข้อสังเกต |
| 1 |
คู่มือ |
คู่มือการเลือกปุ่ม SB1 |
เครื่องหยิบสินค้าอยู่ในสถานะแบบแมนนวลโดยสมบูรณ์ โดยจะดำเนินการเพียงครั้งเดียวเมื่อเป็นไปตามเงื่อนไขการดำเนินการแต่ละอย่าง |
| 2 |
แบบอัตโนมัติ |
การเลือกปุ่ม SB1 อัตโนมัติ |
เครื่องหยิบสินค้าอยู่ในสถานะอัตโนมัติโดยสมบูรณ์ กดปุ่มเริ่มต้นเพื่อให้ทราบถึงการทำงานอัตโนมัติ |
| 3 |
แขนล่วงหน้า |
ด้วยตนเอง ปุ่มเลือก SB2 จะหมุนทวนเข็มนาฬิกาไปทางซ้าย |
เครื่องหล่อในตำแหน่งแม่พิมพ์เปิด แขนหลักไปข้างหน้า ตรวจสอบให้แน่ใจว่าไม่มีสิ่งกีดขวางที่แขนด้านหน้า ไม่เช่นนั้น เครื่องจะได้รับความเสียหาย |
| 4 |
แขนถดถอย |
สถานะแบบแมนนวล ปุ่มเลือก SB2 หมุนตามเข็มนาฬิกาไปทางขวา |
แขนหลักเคลื่อนไปข้างหลัง |
| 5 |
ก่อนการดำเนินการในแนวนอน |
สถานะแบบแมนนวล ปุ่มแนวนอน SB3 |
แขนหลักเคลื่อนที่ไปในทิศทางของโหมดการเคลื่อนที่ |
| 6 |
หลังจากการกระทำในแนวนอน |
สถานะแบบแมนนวล ปุ่มแนวนอน SB3 |
แขนหลักเคลื่อนไปทางแม่พิมพ์ที่อยู่นิ่ง |
| 7 |
แคลมป์มือ |
สถานะแบบแมนนวล, ปุ่มแคลมป์ SB4 |
หนีบมือเพื่อดำเนินการหนีบ |
| 8 |
บีบมือ |
สถานะแบบแมนนวล, ปุ่มแคลมป์ SB4 |
จับมือกันในการกระทำ |
| 9 |
การหมุนแขน |
สถานะแบบแมนนวล ปุ่มหมุนแขน SB5 |
แคลมป์จะเคลื่อนที่ 90 องศาตามเข็มนาฬิกา |
| 10 |
การหมุนแขน |
สถานะแบบแมนนวล ปุ่มหมุนแขน SB5 |
ที่หนีบหมุน 90 องศาทวนเข็มนาฬิกา |

Subscribe to our weekly newsletter and receive exclusive offers on products you love!
 X
X




















 Gold Supplier
Gold Supplier