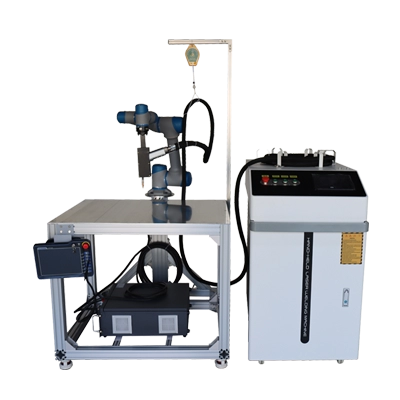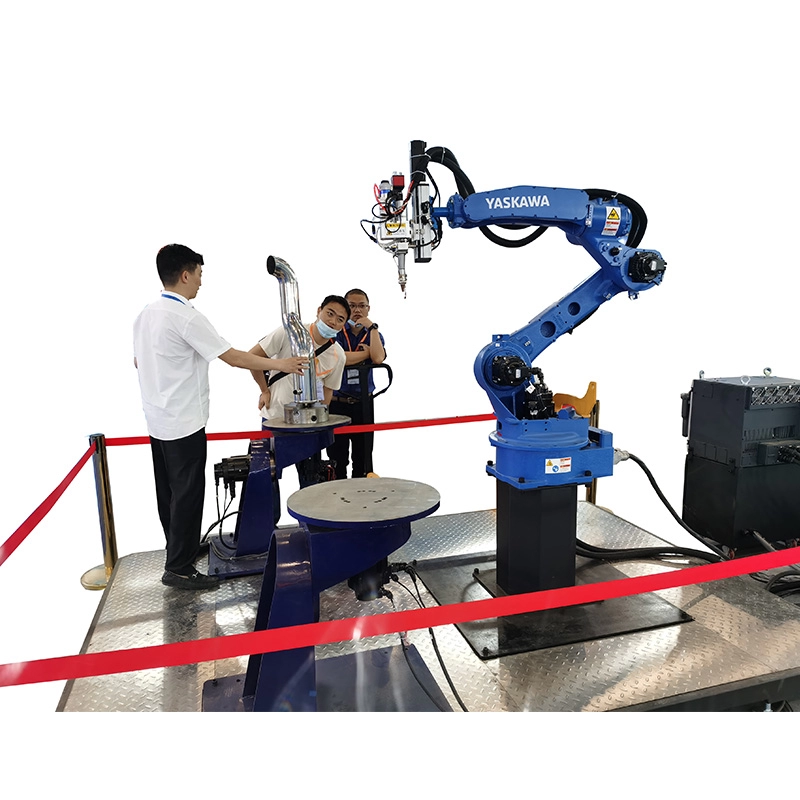



การเชื่อมด้วยเลเซอร์ของหุ่นยนต์แบบสองสถานีใช้แพลตฟอร์มการทำงานแบบสองสถานี การทำงานที่ชาญฉลาดของหุ่นยนต์ และติดตั้งหัวเชื่อมแบบโยกเยก มันปรับแสงคู่ขนานผ่าน collimator และเน้นที่ชิ้นงานเพื่อทำการเชื่อม ด้วยอุปกรณ์อเนกประสงค์ที่เรียบง่าย จึงสามารถเชื่อมชิ้นส่วนที่มีความแม่นยำซึ่งยากต่อการเข้าถึงแม่พิมพ์ขนาดใหญ่ และใช้การเชื่อมแบบสัมผัสค่าธรรมเนียมการส่งผ่านที่ยืดหยุ่น ซึ่งมีความยืดหยุ่นในการใช้งานมากกว่า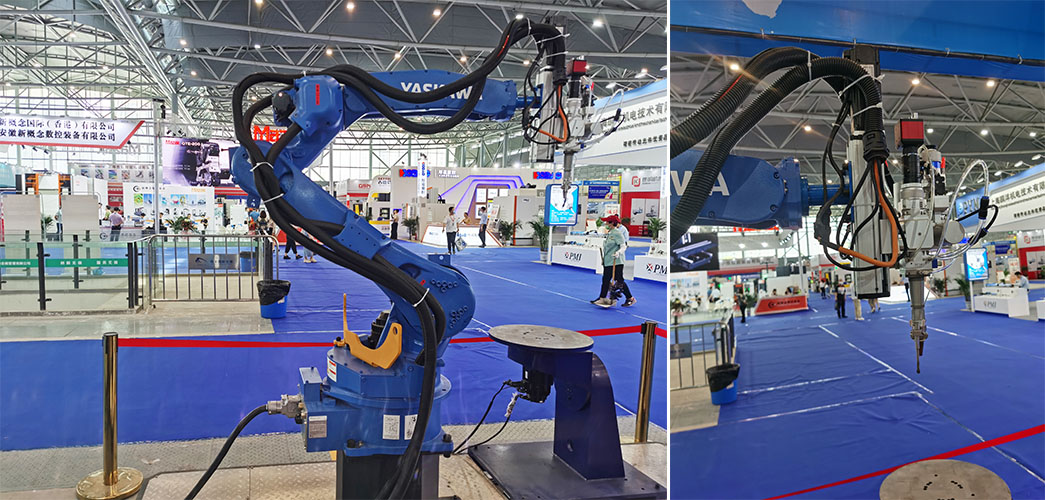


Subscribe to our weekly newsletter and receive exclusive offers on products you love!
 X
X




















 Gold Supplier
Gold Supplier