1.คุณสมบัติ (ดูรูปที่ 1 สำหรับมุมมองภายนอก และตารางที่ 1 สำหรับรุ่น)
| เข้ากันได้กับ DTL/TTL/CMOS ระดับ | 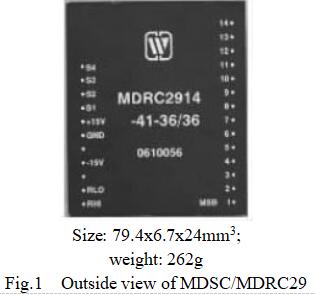 |
| ความละเอียด 12 บิต 14 บิตและ 16 บิต | |
| การป้องกันการลัดวงจรและการโอเวอร์โหลด | |
| ตัวเรือนโลหะกันความร้อนได้ดี | |
| กำลังขับ: 5W |
ตารางที่ 1 รุ่นผลิตภัณฑ์
12 บิต | 14 บิต | 16 บิต | |||
ซิงโคร | รีโซลเวอร์ | ซิงโคร | รีโซลเวอร์ | ซิงโคร | รีโซลเวอร์ |
MDSC2912-411 | MDRC2912-418 | MDSC2914-411 | MDRC2914-418 | MDSC2916-411 | MDRC2916-418 |
MDSC2912-412 | MDRC2912-438 | MDSC2914-412 | MDRC2914-438 | MDSC2916-412 | MDRC2916-438 |
MDSC2912-421 | MDRC2912-414 | MDSC2914-421 | MDRC2914-414 | MDRC2916-414 | |
MDSC2912-422 | MDRC2912-415 | MDSC2914-422 | MDRC2914-415 | MDRC2916-41-36/11.8 | |
MDRC2916-415 | |||||
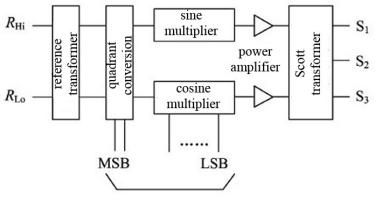
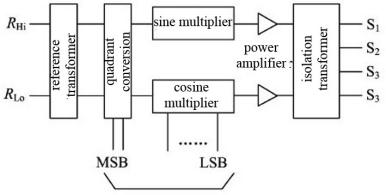
และส่งสัญญาณซิงโคร/รีโซลเวอร์ที่มีความแม่นยำสูงหลังการแปลง ดิ | สินค้ามีวงจรขยายกำลังภายในและ กำลังขับสามารถเข้าถึง 5W 4. ประสิทธิภาพทางไฟฟ้า |
(ตารางที่ 2 และตารางที่ 3) ของ MDSC/MDRC29 Series | ตัวแปลงดิจิตอลเป็นซิงโครหรือตัวแปลงดิจิตอลเป็นตัวแก้ไข ตารางที่ 2 เงื่อนไขการจัดอันดับและเงื่อนไขการใช้งานที่แนะนำ แม็กซ์ ค่าเรตติ้งที่แน่นอน แรงดันไฟจ่าย +VS: +13.5~+17.5V แรงดันไฟ -VS: -17.5~-13.5V ช่วงอุณหภูมิในการจัดเก็บ: -40 ~ 100 ℃ |
แรงดันไฟจ่าย -VS: -16.5~-14.25V | แรงดันอ้างอิง (ค่าที่มีประสิทธิภาพ) Vref*: 115V±5% | แรงดันสัญญาณ (ค่าที่มีประสิทธิภาพ) V1*: 90V±5% | ความถี่อ้างอิง f*: 400Hz±10% | ช่วงอุณหภูมิในการทำงาน TA: -40 ℃ ~ 85 ℃ | |||
หมายเหตุ: * ระบุว่าสามารถปรับแต่งได้ตามความต้องการของผู้ใช้| | |||||||
ตารางที่ 3 ลักษณะทางไฟฟ้า | พารามิเตอร์ | MDRC/DSC2912 | MDRC/DSC2914 | MDRC/DSC2916 | |||
หน่วย | ±8 | ±4 | ±4 | มาตรฐานการทหารขององค์กร (Q/HW30857-2006) | |||
ปณิธาน | 5 | 0 | 5 | 0 | 5 | 0 | V |
12 บิต | 14 บิต | V | |||||
16 บิต | นิดหน่อย | Hz | |||||
ความแม่นยำ นาที | อินพุตดิจิตอล แรงดันอ้างอิง (ค่าที่มีประสิทธิภาพ) | V | |||||
26, 36, 115V±10%﹡ | 5 | W | |||||
 |  |
| (line-line, ตัวแก้ไขหรือซิงโครไนซ์)﹡ | กำลังขับ |



กำลังไฟฟ้าที่ต้องการคือ: (VA) (ไม่ได้ปรับ) xในตัวอย่างข้างต้น ความจุคือ:กำลังที่ต้องการหลังจากการปรับคือ: | ในการออกแบบ จำเป็นต้องสังเกตข้อผิดพลาดที่มักมีอยู่ เช่น หมายเลขคอยล์ ความจุ ความเหนี่ยวนำ ฯลฯ ใน CTข้อควรปฏิบัติสำหรับการปรับโหลด CT:① ไม่จำเป็นต้องใช้ความจุที่มีความแม่นยำสูง ข้อผิดพลาด 20% ก็เพียงพอแล้ว |
 |  |
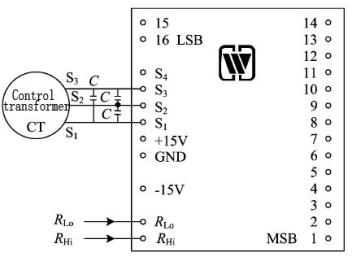
| ② ต้องใช้ตัวเก็บประจุสามตัวระหว่าง S1 และ S2, S2 และ S3 เช่นเดียวกับ S3 และ S1 ③ ทนทานต่อแรงดันไฟและชนิดของประจุไฟฟ้า | สำหรับแรงดันไฟฟ้า line-line 11.8V แรงดันไฟฟ้าที่ทนต่อความจุ |
ความจุ | สำหรับแรงดันไฟฟ้าแบบ line-line ที่ 90V แรงดันไฟฟ้าที่ทนต่อความจุ | ระหว่างพินคือ 150VAC และอนุญาตให้ใช้ความจุเซรามิก | ด้วยค่าคงที่ไดอิเล็กตริกต่ำ | ④ การปรับโหลดของตัวแก้ไขต้องการเพียงสองความจุ หนึ่งคือ | เชื่อมต่อระหว่าง S1 และ S3 และอีกอันระหว่าง S2 และ S4 | (2) คอนโทรลดิฟเฟอเรนเชียลทรานสดิวเซอร์ (CDX) | โหลดของ DSC ในอุปกรณ์ถือได้เหมือนโหลด CT แต่ | ต้องคำนวณอิมพีแดนซ์เทียบเท่า Z เช่นเดียวกับโหลด CT ค่าของมันคือ |
1 | โดยทั่วไป 66%~80% ของ ZSO | (3)ตัวรับแรงบิด (TR) | 11 | 11 | เมื่อเทียบกับ CT และ CDX การควบคุม .ค่อนข้างยาก | 21 | S1 | ตัวรับแรงบิด (TR) โดยทั่วไปแล้ว มันต้องมีผลลัพธ์ |
2 | 2 | เครื่องขยายเสียง เนื่องจากการเปลี่ยนแปลงของเวกเตอร์รัศมีของ MDSC/MDRC28 series | 12 | 12 | ผลิตภัณฑ์ถูกละเลยจึงเหมาะสำหรับการควบคุม TR มากกว่า | 22 | อุปกรณ์เหล่านั้นมีข้อผิดพลาด ±7% สำหรับข้อผิดพลาดกับมุม θ ค่า | ปัจจุบันที่น่าตื่นเต้นคือ: |
3 | 3 | แจ้ง: | 13 | 13 | ①TR ไม่ควรถูกบล็อก | 23 | ②การเลื่อนล่วงหน้าที่สอดคล้องกันจากจุดสิ้นสุดอินพุตอ้างอิงไปยัง DSC จะต้องเป็นไปตามข้อกำหนดของ TR | ③ต้องใช้อินพุตอ้างอิงกับ TR และตัวแปลงเสมอ |
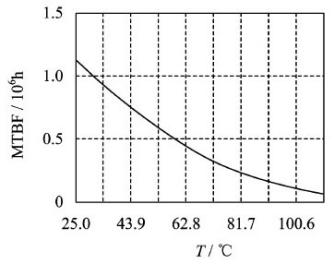
4 | 4 | แรงดันไฟขาออกของ DSC/DRC จะต้องตรงกับแรงดันไฟที่ TR กำหนดโดยสมบูรณ์ | 14 | 14 | 7. เส้นโค้ง MTBF | 24 | NC | (รูปที่ 5) ของ MDSC/MDRC29 Series |
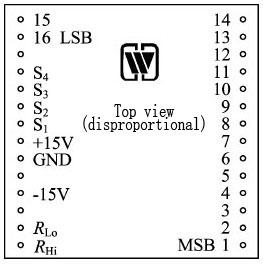
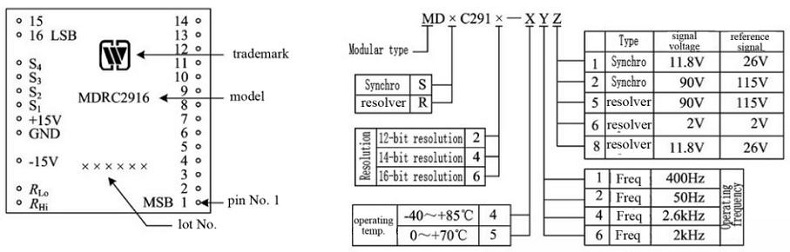
5 | 5 | ตัวแปลงดิจิตอลเป็นซิงโครหรือตัวแปลงดิจิตอลเป็นตัวแก้ไข | 15 | 15 | 8. การกำหนดพิน (รูปที่ 6 ตารางที่ 4) ของ MDSC/MDRC29 Series | 25 | ตัวแปลงดิจิตอลเป็นซิงโครหรือตัวแปลงดิจิตอลเป็นตัวแก้ไข | รูปที่ 5 กราฟอุณหภูมิ MTBF |
6 | 6 | (หมายเหตุ: ตาม GJB/Z299B-98 คาดว่าสภาพพื้นดี) | 16 | 16 | รูปที่ 6 แผนผังของหมุด (มุมมองด้านบน) ตารางที่ 4 การกำหนดพิน | 26 | NC | เข็มหมุด |
7 | 7 | สัญลักษณ์ | 17 | NC | การทำงาน | 27 | เข็มหมุด | สัญลักษณ์ |
8 | 8 | การทำงาน | 18 | S4 | เข็มหมุด | 28 | สัญลักษณ์ | การทำงาน |
9 | 9 | 1 (เอ็มเอสบี) | 19 | S3 | อินพุตดิจิตอล 1 | |||
10 | 10 | อินพุตดิจิตอล 11 | 20 | S2 | สัญญาณเอาท์พุต 1 |
อินพุตดิจิตอล2
อินพุตดิจิตอล 12
+15V
อินพุต +15V
อินพุตดิจิตอล 3
อินพุตดิจิตอล 13
ปล่อยให้ไม่มีการเชื่อมต่อ | อินพุตดิจิตอล 5 | อินพุตดิจิตอล 15 | (12 บิตและ 14 บิตไม่ได้เชื่อมต่อกัน) | -15V | -15V อินพุต |
1 | อินพุตดิจิตอล6 | 6 | อินพุตดิจิตอล 16 | 11 | (ไม่ได้เชื่อมต่อ 12 บิตและ 14 บิต) |
2 | ปล่อยให้ไม่มีการเชื่อมต่อ | 7 | อินพุตดิจิตอล7 | ปล่อยให้ไม่มีการเชื่อมต่อ | RLo |
3 | อินพุตอ้างอิงต่ำสุด | 8 | อินพุตดิจิตอล 8 | 13 | เอาต์พุตสัญญาณ 4 |
4 | RHi | 9 | อินพุตอ้างอิงระดับสูง | อินพุตดิจิตอล 9 | สัญญาณเอาท์พุต 3 |
5 | อินพุตดิจิตอล 10 | 10 | สัญญาณเอาท์พุต2 |


Subscribe to our weekly newsletter and receive exclusive offers on products you love!
 X
X




















 Gold Supplier
Gold Supplier