| ความถี่ในการกระตุ้น 50Hz, 400Hz และ 2.6kHz | -1") |
| ความละเอียด: 10 บิต, 12 บิต, 14 บิต | |
| ความเร็วในการติดตามสูง | |
| อินพุตที่ไม่ได้มาตรฐานสามารถปรับได้ด้วยความต้านทานภายนอกหรือปรับที่ขั้วต่ออินพุตของผลิตภัณฑ์ | |
| เอาต์พุตแรงดันไฟฟ้ากระแสตรงเป็นสัดส่วนโดยตรงกับความเร็วเชิงมุม | |
| เข้ากันได้กับชุด SDC1700 ของ American AD company |
การแปลง | กำลังไฟในการทำงานคือ ±15V และ + 5V DC มีสองประเภทคือ |
สัญญาณเอาท์พุต: ซิงโครไนซ์สามบรรทัดและสัญญาณอ้างอิง (ตัวแปลง SDC) | |
หรือตัวแก้ไขสี่บรรทัดและสัญญาณอ้างอิง (ตัวแปลง RDC); ผลลัพธ์ | |
เป็นรหัสดิจิตอลคู่ขนานของระบบเลขฐานสอง | 4 ประสิทธิภาพทางไฟฟ้า (ตารางที่ 2 ตารางที่ 3) ของ Synchro to |
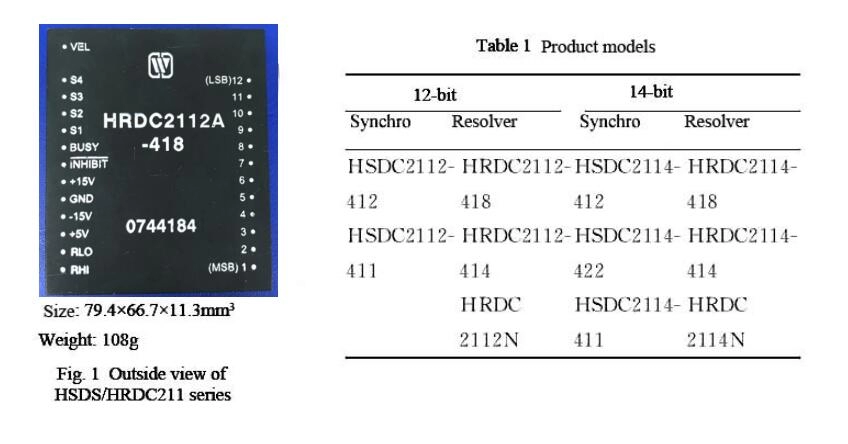
ตัวแปลงดิจิทัลหรือตัวแก้ไขเป็นตัวแปลงดิจิทัล (HSDC/HRDC211 | |
ชุด) | |
ตารางที่ 2 เงื่อนไขการจัดอันดับและเงื่อนไขการใช้งานที่แนะนำ | |
สูงสุดแน่นอน ค่านิยม | |
แรงดันไฟจ่าย Vs: ± 17.5V |
-3")

| ค่าประสิทธิผลของแรงดันอ้างอิง Vref: 11.8V, 26V, 115V ค่าประสิทธิผลของแรงดันอ้างอิง V1*: 11.8V, 26V, 90V | -5") ความถี่อ้างอิง f*: 50Hz, 400Hz, 2.6kHz |
-6")
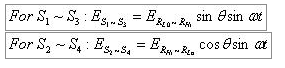
โดยที่ θ คือมุมอินพุตแบบอะนาล็อก สัญญาณมุมฉากคูณด้วยมุมดิจิตอลไบนารี φ ใน สัญญาณมุมฉากคูณด้วยมุมดิจิตอลไบนารี φ ใน | ตัวนับย้อนกลับภายในในตัวคูณฟังก์ชันไซน์-โคไซน์และ |
θ-φ≠0, ออสซิลเลเตอร์ที่ควบคุมด้วยแรงดันไฟฟ้าจะส่งสัญญาณพัลส์เพื่อเปลี่ยน | ข้อมูลในตัวนับย้อนกลับ จนกระทั่ง θ-φ กลายเป็นศูนย์ภายใน |
 |  |
| ความแม่นยำของคอนเวอร์เตอร์ ในระหว่างกระบวนการนี้ คอนเวอร์เตอร์จะติดตาม เปลี่ยนมุมอินพุต θ ตลอดเวลา หลักการทำงาน ดูในรูป | 2. ฟังก์ชั่นการถ่ายโอน: ต่อไปนี้เป็นพารามิเตอร์สำหรับฟังก์ชั่นการถ่ายโอนของ HSDC2112 และ HSDC2114(400Hz) สำหรับรุ่นอื่นๆ โปรดติดต่อ ผู้ผลิตโดยตรง รูปที่ 2 บล็อกไดอะแกรมสำหรับหลักการทำงานของคอนเวอร์เตอร์ |
มีสองวิธีในการอ่านข้อมูลที่ถูกต้องของตัวแปลงดังนี้: | วิธีการยับยั้ง (การอ่านแบบซิงโครนัส): | ตั้ง Inhibit เป็นตรรกะ "0" ในขณะนี้ ตัวแปลงจะหยุดการติดตาม รอ | 1μs จนกว่าข้อมูลเอาต์พุตจะเสถียร อ่านข้อมูล ข้อมูลที่อ่านคือ | ใช้ได้ในขณะนี้ (ล่าช้า 1μs) ตั้งค่าเป็นลอจิก "1" ในขณะนี้ ตัวแปลงจะเริ่มติดตามอีกครั้งเพื่อเตรียมพร้อมสำหรับการอ่านข้อมูลที่ถูกต้องถัดไป | วิธีไม่ว่าง (การอ่านแบบอะซิงโครนัส):ยับยั้ง |
1 | D1 | ในโหมดการอ่านแบบอะซิงโครนัส | 15 | ถูกตั้งค่าเป็นลอจิก “1” หรือว่าง ถ้าลูปภายในคงที่เสมอ | รัฐหรือหากข้อมูลที่ส่งออกถูกต้องให้กำหนดผ่าน |
2 | D2 | สถานะของสัญญาณไม่ว่างไม่ว่าง เมื่อสัญญาณ Busy อยู่ในระดับสูง มัน | 16 | S4 | แสดงว่าข้อมูลกำลังถูกแปลง และข้อมูลในขณะนี้คือ |
3 | D3 | ไม่เสถียรและไม่ถูกต้อง เมื่อสัญญาณ Busy อยู่ที่ระดับต่ำแสดงว่า | 17 | S3 | การแปลงข้อมูลเสร็จสิ้นแล้ว และข้อมูล ณ เวลานี้มีเสถียรภาพ |
4 | D4 | และถูกต้อง ในโหมดการอ่านแบบอะซิงโครนัส เอาต์พุตไม่ว่างคือพัลส์เทรนของ | 18 | S2 | ระดับ TTL ความกว้างระหว่างนั้นสัมพันธ์กับความเร็วในการหมุน อ้างถึง |
5 | D5 | แผนภาพลำดับเวลาของการถ่ายโอนข้อมูล รูปที่ 3 | 19 | S1 | รูปที่ 3 ลำดับเวลาของการถ่ายโอนข้อมูล |
6 | D6 | (2) วิธีการลดทอนสัญญาณอินพุต | 20 | หากซิงโครหรือตัวแก้ไขที่ผู้ใช้ใช้ไม่ได้มาตรฐานเพื่อที่จะ | ทำให้แรงดันสัญญาณอินพุตและแรงดันกระตุ้นอินพุตตรงกับ |
7 | D7 | ค่าเล็กน้อยของตัวแปลง ผู้ใช้อาจใช้วิธีของ | 21 |
| ความต้านทานการลดทอนภายนอกที่ต่อเป็นอนุกรม กล่าวคือ สำหรับทุกๆ 1V |
8 | D8 | เกินค่าเล็กน้อย เชื่อมต่อความต้านทาน 1.1kΩ เป็นอนุกรมที่ | 22 | ขั้วอินพุตที่สอดคล้องกัน เมื่อใช้ตัวแปลง อนุกรม | ความต้านทานที่ขั้วแต่ละขั้วจะต้องได้รับการคัดเลือกและตกแต่งอย่างแม่นยำ |
9 | D9 | และวัสดุต้านทานของรุ่นเดียวกันจะต้องถูกนำมาใช้เพื่อให้แน่ใจว่า | 23 | ความแม่นยำในการแปลงของคอนเวอร์เตอร์ภายในอุณหภูมิกว้าง | ช่วง สำหรับทุก ๆ 0.1% ข้อผิดพลาดในการจับคู่ของความต้านทานอนุกรมจะ |
10 | สร้างข้อผิดพลาดในการแปลงนาทีเชิงมุม 1.7 นาที | ผู้ผลิตแนะนำว่าควรแจ้ง | 24 | ผู้ผลิตปรับแต่งซิงโครหรือตัวแก้ไขที่ไม่ได้มาตรฐานเป็น | ตามพารามิเตอร์ที่จำเป็นเมื่อผู้ใช้ใช้ |
11 | เส้นโค้ง MTBF 6 เส้น (รูปที่ 4) ของตัวแปลง Synchro เป็น Digital หรือตัวแก้ไขเป็นตัวแปลงดิจิทัล (HSDC/HRDC211 Series) | การกำหนดพิน 7 ตัว (รูปที่ 5 ตารางที่ 4) ของตัวแปลงซิงโครเป็นดิจิทัลหรือตัวแก้ไขเป็นตัวแปลงดิจิทัล (ซีรีส์ HSDC/HRDC211) | 25 | รูปที่ 4 เส้นโค้งอุณหภูมิ MTBF | (หมายเหตุ: ตาม GJB/Z299B-98 คาดว่าสภาพพื้นดี) |
12 | หมายเหตุ: | ① โครงสร้างด้านบนเหมาะสำหรับ HRDC2114 | 26 | ② สำหรับ SDC ไม่มีพิน S4 | ③ สำหรับอุปกรณ์ 12 บิต, ไม่มีพิน 13 และ 14, สำหรับอุปกรณ์ 10 บิต, ไม่มีพิน 11, 12, 13 และ 14 |
13 | รูปที่ 5 การกำหนดพิน (มุมมองด้านบน) | ตารางที่ 4 การกำหนดพิน | 27 | เข็มหมุด | สัญลักษณ์ |
14 | การทำงาน | เข็มหมุด |
-16")
| อินพุตสัญญาณ เอาต์พุตดิจิตอลของบิต 6 ยุ่ง อินพุตสัญญาณไม่ว่าง | -18") |
 | เอาต์พุตดิจิตอลของบิต 7 |

| -15V | -25") -15V แหล่งจ่ายไฟ |
-24") D11 |
-26") | -27") |
| แหล่งจ่ายไฟ +5V | D12 |
-29")

Subscribe to our weekly newsletter and receive exclusive offers on products you love!
 X
X





















 Gold Supplier
Gold Supplier