| ความละเอียด 14 บิตและ 16 บิต | 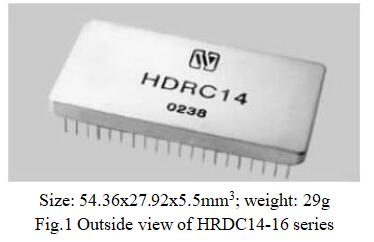 |
| ความแม่นยำ 4′ และ 2′ | |
| ความจุของไดรฟ์เอาท์พุต 2VA | |
| ข้อผิดพลาดเวกเตอร์รัศมีต่ำ (0.03%) | |
| มีระบบป้องกันไฟเกินและไฟฟ้าลัดวงจร | |
| มีพินเอาท์พุตเทเลเมทริกซ์ | |
| โดยไม่ต้องปรับแต่งภายนอก | |
| ความเข้ากันได้แบบพินต่อพินกับผลิตภัณฑ์ DRC1745/1746 ของบริษัท AD |
ไดรฟ์ซิงโครไนซ์/ตัวแก้ไข; ระบบเสาอากาศ ระบบเซอร์โว แบบบูรณาการ
เครื่องจำลอง
3. คำอธิบายของ HDRC14-16 Series Digital to Synchro Converters หรือ Digital to Resolver Converters
ผลิตภัณฑ์ซีรีส์ HDRC14/HDRC16 เป็นตัวแปลงดิจิทัลไปยังตัวแปลงรีโซลเวอร์หรือ
ตัวแปลงสัญญาณดิจิตอลเป็นซิงโครไนซ์ของโครงสร้างวงจรรวมไฮบริด
โหลดสามารถเป็นโหลดอุปนัย โหลด capacitive หรือโหลดความต้านทาน และมันคือ | |
มีการป้องกันกระแสไฟเกินและแรงดันไฟเกิน ผลลัพธ์ของ | ตัวแปลงสามารถขับเคลื่อนตัวแก้ไขโดยตรงและยังสามารถขับ ควบคุมหม้อแปลงซิงโครไนซ์โดยเชื่อมต่อหม้อแปลงภายนอก ประสิทธิภาพที่เป็นเอกลักษณ์ของผลิตภัณฑ์ซีรีส์ HDRC14/HDRC16 คือไซน์และ |
โคไซน์เทเลเมทริกเอาท์พุต ดังนั้นเมื่อทำการขับทางไกลก็สามารถรับรองความแม่นยำของสัญญาณเอาต์พุตที่แปลงแล้ว | ผลิตภัณฑ์ซีรีส์ HDRC14/HDRC16 มีสลักภายในซึ่ง ถูกควบคุมผ่าน high bit enable end HBE และ low bit enable end LBE และสามารถเชื่อมต่อกับ data bus ได้สะดวก ผลิตภัณฑ์ซีรีส์ HDRC14/HDRC16 เป็นแพ็คเกจโลหะ 40 พินอินไลน์คู่ |
4. ประสิทธิภาพทางไฟฟ้า (ตารางที่ 1, ตารางที่ 2) ของ HDRC14-16 ซีรี่ส์ Digital to Synchro Converters หรือ Digital to Resolver Converters | ||||||
ตารางที่ 1 เงื่อนไขการจัดอันดับและเงื่อนไขการใช้งานที่แนะนำ | สูงสุดแน่นอน ค่านิยม | แรงดันไฟจ่าย Vs: ± 7.25V | แรงดันลอจิก VL: +5.5V | ช่วงอุณหภูมิในการจัดเก็บ: -65℃~+150℃ | ||
การดำเนินงานที่แนะนำ | เงื่อนไข | แรงดันไฟจ่าย Vs: ± 5V | แรงดันลอจิก VL: +5V | |||
ความถี่อ้างอิง f: 400Hz ~ 2000Hz | - | 14 | - | 16 | ช่วงอุณหภูมิในการทำงาน TA: -55℃~125℃ | |
ตารางที่ 2 ลักษณะทางไฟฟ้า | - | ลักษณะ | - | ±2 | HDRC14 | |
HDRC16 | หน่วย | หมายเหตุ | นาที. | แม็กซ์ | V | |
นาที. | แม็กซ์ | ปณิธาน | นิดหน่อย | มุมผิดพลาด | V | |
±5.3 นาทีเชิงมุม | อินพุตอ้างอิงอนาล็อก | 3.23 | 3.57 | 3.23 | V | |
3.57 | - | 25 | - | 25 | เอาต์พุตสัญญาณของตัวแก้ไข | |
6.46 | 0 | 7.14 | 0 | 6.46 | 7.14 | |
ได้รับ | (Vref-Vo) | - | 1.999 | - | kΩ | |
2.001 | - | 1.999 | - | 2.001 | Ω | |
ค่าสัมประสิทธิ์อุณหภูมิของการเพิ่มผลผลิต | - | 2 | - | 2 | VA | |
PPM/℃ | - | ช่วงความถี่อินพุตแบบอะนาล็อก | - | 2.6 | - | |
2.6 | kHz | อิมพีแดนซ์อินพุตแบบอะนาล็อก | - | |||










 (2) แหล่งจ่ายไฟเป็นจังหวะ
(2) แหล่งจ่ายไฟเป็นจังหวะ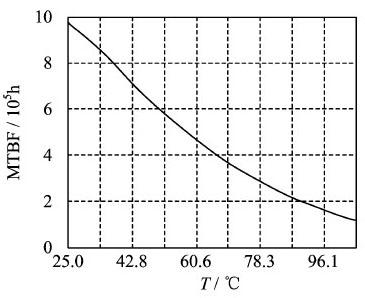

Zu003dโหลดเอาต์พุต | (3) ตัวอย่างการใช้พลังงาน | มีหลายปัจจัยที่มีอิทธิพลต่อการใช้พลังงาน ได้แก่ | สี่ตัวอย่างต่อไปนี้ใช้โหลดทั่วไปและมุมดิจิตอลที่แย่ที่สุด | รัฐ (45º) ตัวอย่างเหล่านี้สามารถแสดงให้เห็นว่าการใช้กำลังการเต้นเป็นจังหวะ | สามารถลดการใช้พลังงาน | ที่นี่เงื่อนไขการใช้งานคือ: | VDCu003d±15V; Vpu003d3V; Vout u003d 9.6V (ค่า RMS คือ 6.8V); VACu003d9.6V (โดยประมาณ | เท่ากับ Vout); I1u003d292mA (เทียบเท่ากับโหลดที่ต้องการ 1.4VA) |
1 | ① แหล่งจ่ายไฟ DC, θu003d45º, โหลดตัวต้านทาน | ② เหมือนกับตัวอย่างที่ 1 แหล่งจ่ายไฟเป็นแหล่งจ่ายไฟแบบ 3V แบบพัลซิ่ง | 13 | เมื่อใช้กำลังการเต้นเป็นจังหวะ การสิ้นเปลืองพลังงานภายในจะลดลง 1.75W อัตราส่วนคือ 3.2:1 | ③ แหล่งจ่ายไฟ DC, θu003d45º, โหลดอุปนัยบริสุทธิ์ | 28 | ④ เช่นเดียวกับตัวอย่างที่ 3 แหล่งจ่ายไฟคือแหล่งจ่ายไฟ 3V แบบพัลซิ่ง | (4)โหลด |
2 | D2 | ต่อไป เราจะอธิบายวิธีการคำนวณโหลด สำหรับการควบคุม | 14 | หม้อแปลงซิงโครนัสก่อนอื่นจะต้องได้รับค่า Zso | ซึ่งโดยทั่วไปจะมีให้โดยผู้ผลิตซิงโครไนซ์ การควบคุม | 29 | V- | โหลดคือ: |
3 | D3 | โดยที่ V2 คือค่า RMS ของแรงดันสัญญาณ | 15 | ถ้าเพิ่มหม้อแปลงเอาท์พุทที่ขาเอาท์พุท จะต้องเพิ่ม 0.25VA ให้กับกำลังที่คำนวณได้ | ตัวอย่างเช่น สมมติว่าค่า RMS ของสัญญาณคือ 90V, 400Hz, use | 30 | V+ | HRDC14 หม้อแปลงเอาท์พุตภายนอกเพื่อขับเคลื่อนหม้อแปลงควบคุมของ |
4 | D4 | ซิงโครไนซ์ การใช้หม้อแปลงภายนอกเพื่อเพิ่มค่า RMS ของ | 16 | แรงดันเอาต์พุตของ HRDC14 จาก 6.8 V ถึง 90V ที่ตัวควบคุมต้องการ | หม้อแปลงไฟฟ้า | 31 | สำหรับหม้อแปลงควบคุมของซิงโครไนซ์ Zso คือ 700+j4900 | ดังนั้นโหลดเมื่อใช้หม้อแปลงควบคุมคือ: |
5 | D5 | ; บวกกับการใช้พลังงานเพิ่มเติมของหม้อแปลงไฟฟ้า การบริโภคพลังงานทั้งหมดคือ 1.48VA | วิธีนี้ยังสามารถใช้กับงานที่ใช้โรตารี่ | NC | หม้อแปลงควบคุมแต่ไม่ต้องคูณ 3/4 | 32 | LE | 6. เส้นโค้ง MTBF (รูปที่ 3) ของ HDRC14-16 Series Digital to Synchro Converters หรือ Digital to Resolver Converters |
6 | D6 | รูปที่ 3 เส้นโค้งอุณหภูมิ MTBF | 21 | (หมายเหตุ: ตาม GJB/Z299B-98 คาดว่าสภาพพื้นดี) | 7. การกำหนดพิน (รูปที่ 4, ตารางที่ 3) ของ HDRC14-16 Series Digital to Synchro Converters หรือ Digital to Resolver Converters | 33 | HE | รูปที่ 4 แผนผังไดอะแกรมของพิน (มุมมองด้านล่าง) |
7 | D7 | ตารางที่ 3 คำอธิบายการทำงานของหมุด | 22 | เข็มหมุด | สัญลักษณ์ | 34 | การทำงาน | เข็มหมุด |
8 | D8 | สัญลักษณ์ | 23 | การทำงาน | เข็มหมุด | 35 | สัญลักษณ์ | การทำงาน |
9 | D9 | D1(เอ็มเอสบี) | 24 | อินพุตดิจิตอลบิตที่ 1 | D13 | 36 | อินพุตดิจิตอลบิตที่ 13 | GNDA |
10 | กราวด์อนาล็อก | อินพุตดิจิตอลบิตที่ 2 | 25 | D14(แอลเอสบี) | อินพุตดิจิตอลบิตที่ 14 | -15V แหล่งจ่ายไฟ | NC | อินพุตดิจิตอลบิตที่ 3 |
11 | D15 | อินพุตดิจิตอลบิตที่ 15 | 26 | แหล่งจ่ายไฟ 15V | อินพุตดิจิตอลบิตที่ 4 | |||
12 | D16(แอลเอสบี) | อินพุตดิจิตอลบิตที่ 16 | 27 | V1+ | แหล่งจ่ายไฟ +5V |
โคไซน์เอาต์พุตสิ้นสุด | เปิดใช้งานการเลือก 8 บิตสูง | อินพุตดิจิตอล 7 บิต | Vsin | ปลายเอาต์พุตไซน์ | RLo | |
1 | อินพุตอ้างอิงต่ำสุด | 7 | อินพุตดิจิตอลบิตที่ 8 | 13 | วี+พี | |
2 | +15V พลังการเต้นเป็นจังหวะ | 8 | RHi | อินพุตอ้างอิงระดับสูง | อินพุตดิจิตอลบิตที่ 9 | |
3 | วีพี | 9 | -15V พลังเร้าใจ | 15 | กรณี | |
4 | เคสกราวด์ | 10 | D10 | อินพุตดิจิตอลบิตที่ 10 | cos telemetry | |
5 | โคไซน์ telemetric end | 11 | 37-40 | |||
6 | ไม่มีการเชื่อมต่อ | 12 | D11 |
มาตรบาป | ปลายไซน์เทเลเมทริก |
 | |

จำเป็นจากนั้น "HBE" และ "LBE" สามารถเป็นวงจรเปิดได้ | พินอินพุตดิจิตอลทั้งหมดมีความต้านทานการดึงขึ้น27kΩภายในเป็น | เชื่อมต่อกับแหล่งจ่ายไฟ 5V ดังนั้นหากกระแสไฟ 50μA บนอินพุตสลักใด ๆ | พินรั่วไปยังไดรฟ์ดิจิตอลภายนอก มันยังสามารถตรวจสอบอินพุตทั้งหมดได้ | พินที่เข้ากันได้กับระดับ TTL นั้นเสถียร | 8. ตารางค่าน้ำหนัก (ตารางที่ 4) ของ HDRC14-16 Series Digital to Synchro Converters หรือ Digital to Resolver Converters | ตารางที่ 4 ตารางค่าน้ำหนัก | บิต/(MSB) | มุม |
บิต/(MSB) | มุม | บิต/(MSB) | มุม | 180,000 0 | 2.812 5 | 0.043 9 | 90.000 0 |


Subscribe to our weekly newsletter and receive exclusive offers on products you love!
 X
X




















 Gold Supplier
Gold Supplier